Publication 20D-UM002C-EN-P - November 2003
5-10 Configuring DriveLogix Motion
5. Adding the Axis (continued)
A
B
C
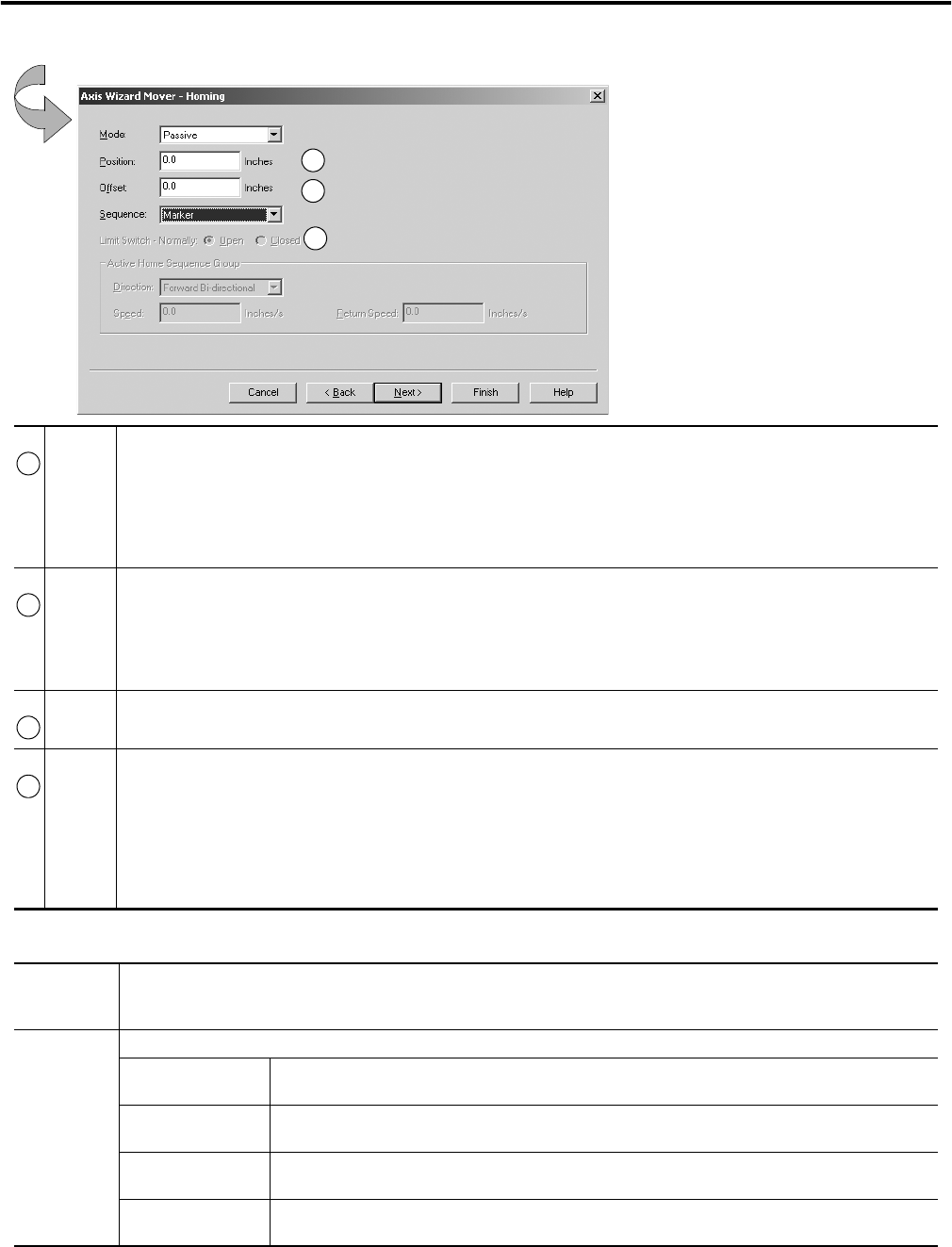
Homing
Mode
Active - the desired homing sequence is selected by specifying whether a home limit switch and/or the encoder marker are used for this axis. Active
homing sequences always use the trapezoidal velocity profile.
Passive - homing redefines the absolute position of the axis on the occurrence of a home switch or encoder marker event. Passive homing is most
commonly used to calibrate uncontrolled axes, although it can also be used with controlled axes to create a custom homing sequence. Passive
homing, for a given home sequence, works similar to the corresponding active homing sequence, except that no motion is commanded; the controller
just waits for the switch and marker events to occur.
Homing
Position
Type the desired absolute position, in position units, for the axis after the specified homing sequence has been completed. In most cases, this
position will be set to zero, although any value within the software travel limits can be used. After the homing sequence is complete, the axis is left
in this position.
If the Positioning Mode (set in the Conversion tab) of the axis is Linear, then the home position should be within the travel limits, if enabled. If the
Positioning Mode is Rotary, then the home position should be less than the unwind distance in position units.
Offset Type the desired offset (if any) in position units the axis is to move, upon completion of the homing sequence, to reach the home position. In most
cases, this value will be zero.
Homing
Sequence
Select the event that will cause the Home Position to be set:
Sequence Type Description
Immediate Sets the Home Position to the present actual position, without motion.
Switch Sets the Home Position when axis motion encounters a home limit switch.
Marker Sets the Home Position when axis encounters an encoder marker.
Switch-Marker Sets the Home Position when axis first encounters a home limit switch, then encounters
an encoder marker.
Limit Switch If a limit switch is used, indicate the normal state of that switch (i.e., before being engaged by the axis during the homing sequence):
Normally Open
Normally Closed
Direction For active homing sequences, except for the Immediate Sequence type, select the desired homing direction:
Forward Uni-directional The axis jogs in the positive axial direction until a homing event (switch or marker) is encountered, then continues in the
same direction until axis motion stops (after decelerating or moving the Offset distance).
Forward Bi-directional The axis jogs in the positive axial direction until a homing event (switch or marker) is encountered, then reverses
direction until motion stops (after decelerating or moving the Offset distance).
Reverse Uni-directional The axis jogs in the negative axial direction until a homing event (switch or marker) is encountered, then continues in the
same direction until axis motion stops (after decelerating or moving the Offset distance).
Reverse Bi-directional The axis jogs in the negative axial direction until a homing event (switch or marker) is encountered, then reverses
direction until motion stops (after decelerating or moving the Offset distance).
A
B
C
D
Click Next
Referring to the tables below, enter the
Homing Mode, Homing Position, Offset, and
Homing Sequence.








































































































































































































































































