



















13
Operating Manual - ne24.24M Matrix Processor
is 0 degree phase shift, at the All Pass filter center frequency there
is -180 degrees of phase shift, and at high frequencies there is -360
degrees of phase shift.
Each input channel has an EQ On/Off button for all filters,
and in turn each filter band has its own bypass button. The Flatten
Curve function returns all filters to 0dB, but preserves the frequency
and bandwidth of any used filters.
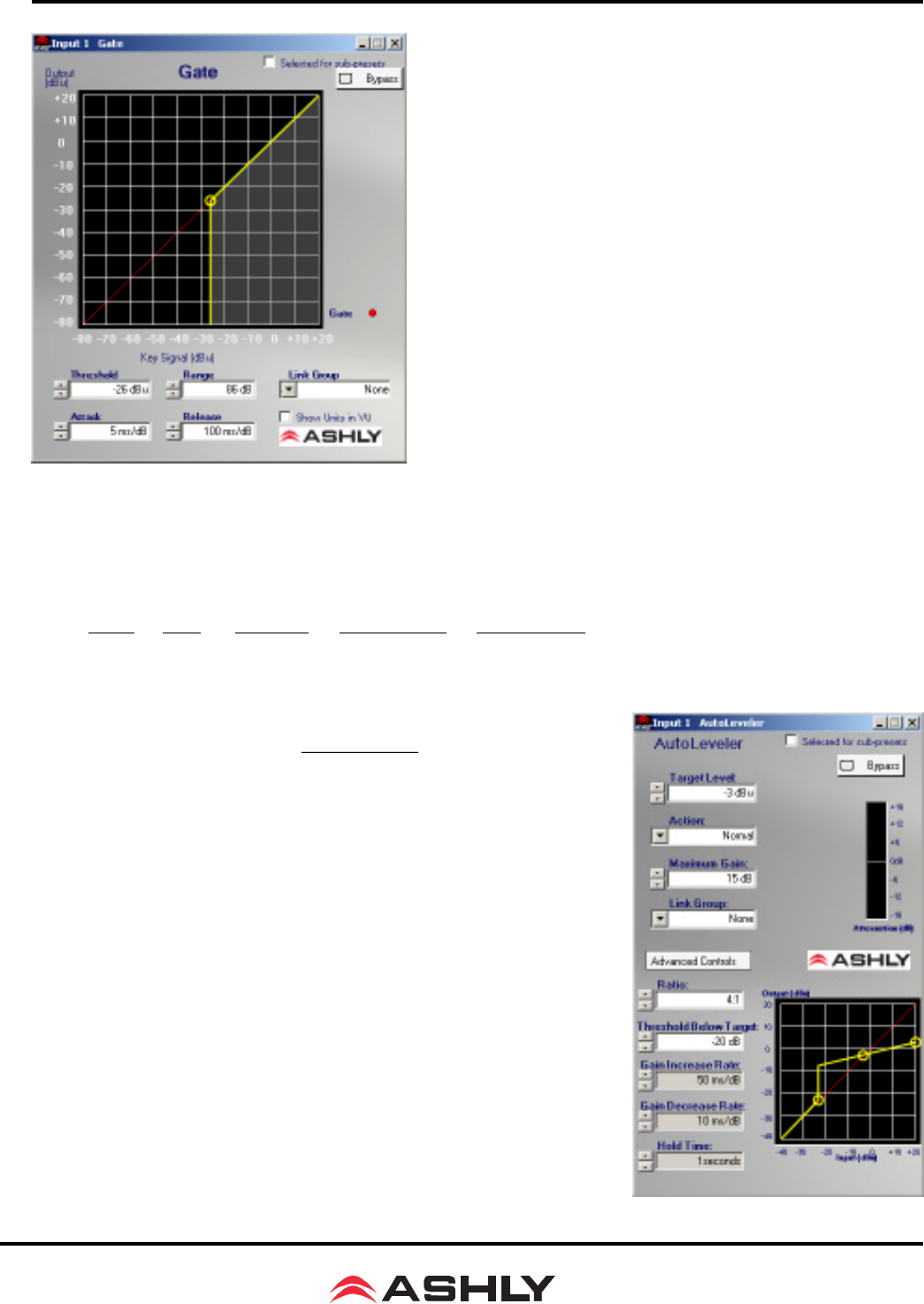
8.1g Noise Gate
Noise gates are used to minimize unwanted or ambient low
level signal from an individual mic input. THRESHOLD is the
level above which an input signal will pass through, and below which
its signal is turned off. RANGE is the amount of attenuation in dB
which the noise gate attenuates the signal when the gate is off.
ATTACK and RELEASE control the time characteristics of the
gating action. Attack sets the amount of time it takes for the gate to
open or gated signal to turn on. Release sets the time required for
the gate to close back up when the input signal falls below thresh-
old.
8.1h Autoleveler
An Autoleveler is a dynamics processor used to automatically boost or cut a signal to a user defined target level.
TARGET LEVEL is the primary setting in an autoleveler, as it determines the desired constant level to which an input is
boost or cut. Both basic mode and advanced mode utilize the target level control, but basic mode simplifies setup. In
BASIC MODE, target level, action, and maximum gain are the available controls. ACTION is selectable to gentle,
normal, or aggressive, and automatically adjusts the following controls found in advanced mode:
MAXIMUM GAIN controls the threshold below target using the follow-
ing formula:
In ADVANCED MODE, THRESHOLD BELOW TARGET determines
the input signal level relative to the target level, above which the autoleveler
increases gain, and below which no action is taken. RATIO is defined as the
relationship of input level change in dB to output level change in dB. It is a
measure of how aggressively the autoleveler changes the gain to maintain a
constant output target level. GAIN INCREASE RATE and GAIN DECREASE
RATE are used to prevent sudden, choppy sounding level changes to an input
signal having a wide dynamic range. HOLD TIME is used in conjunction with
gain change rate, and is defined as the time after the input signal falls below
the threshold during which the autolever’s gain is held constant before it re-
turns to unity gain. The purpose is to reduce the amount of gain “chatter” and
abrupt signal cutoff when the input signal is hovering around the threshold
level. Advanced settings which are different than the three Basic action set-
tings results in a USER DEFINED display in the basic action control.
Thr =
Max Gain
(1/ratio - 1)
Action Ratio Hold Time Gain Incr. Rate Gain Dec. Rate
Aggressive
10:1 0 Sec 20ms/dB 5 ms/dB
Normal
4:1 1 Sec 50ms/dB 10 ms/dB
Gentle
2:1 2 Sec 100ms/dB 20 ms/dB