Commander GP User Guide
Issue code: gpxu2
Setting Up the Drive 3-31
Setting up and using Macro 4
Torque control
1. By default, the Drive operates in frequency
control. To disable this and enable torque
control, close the TORQUE ENABLE contact
(terminal 29).
2. Set 0.02 Frequency over-ride at the required
value to limit the maximum speed of the motor.
3. Set the analog torque reference at the
required level.
4. If required, adjust 0.29 Analog input 1 scaling to
change the scaling of the torque reference
input (see Torque slaving below).
5. If required, adjust 0.30 Analog input 2 scaling to
change the scaling of the frequency reference
input.
6. Set 0.28 Over-speed threshold at the frequency
that the Drive is to trip for protecting the
system.
Default value: ([0.02] x 1.2) Hz
Range: 0 ~ ([1.06] x 1.2) Hz
7. Monitor the torque reference by displaying
parameter 0.25 Analog input 1.
Reference selection
For correct operation of this macro configuration,
the setting of parameter 0.05 Reference selection
should be at 0.
Jog frequency
There is no need to adjust 0.14 Jog reference since
the jog function cannot be used.
Analog input modes
The analog inputs can be configured for the
following input signals:
0 ~ 20mA, 4 ~ 20mA or 0 ~ 10V
Refer to the following parameters in Appendix D
Menu 0 Parameters for selecting the required mode:
Analog
input
Terminal(s) Parameter
1 5, 6
0.24
Analog input 1 mode selector
27
0.26
Analog input 2 mode selector
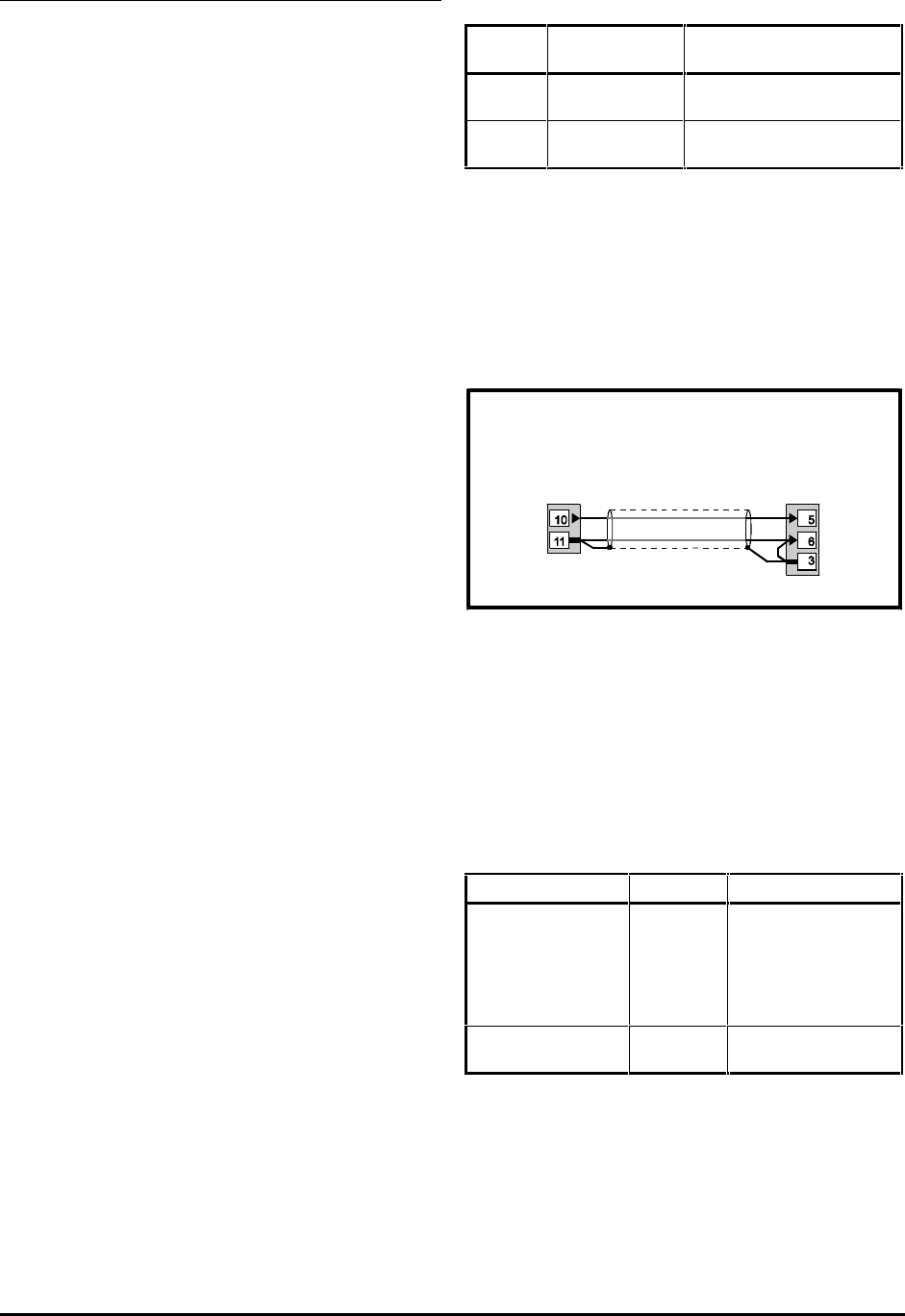
Torque slaving
1. Set up a master Drive in Macro 0 with
frequency control.
2. Set up slave Drive(s) in Macro 4.
3. Make connections between the Drives as shown
in Figure 3–12.
Master Drive Slave Drive
Signal
connector
(part)
Signal
connector
(part)
Figure 3–12 Torque slaving connections
4. If the slave Drive(s) is to deliver a different
torque from that of the master Drive, for
(each) slave Drive, adjust 0.29 Analog input 1
scaling accordingly.
Stopping and braking modes
Refer to the following parameters in Appendix D
Menu 0 Parameters:
Parameter
Function
0.150.15
Ramp mode selector
(Standard controlled)
Deceleration time is
extended if the
DC-bus
voltage reaches its
maximum permissible
value during braking.
0.160.16
Stop mode selector
Ramp to stop then the
Drive is disabled























































































































