Commander GP User Guide
Issue code: gpxu2
3-36 Setting Up the Drive
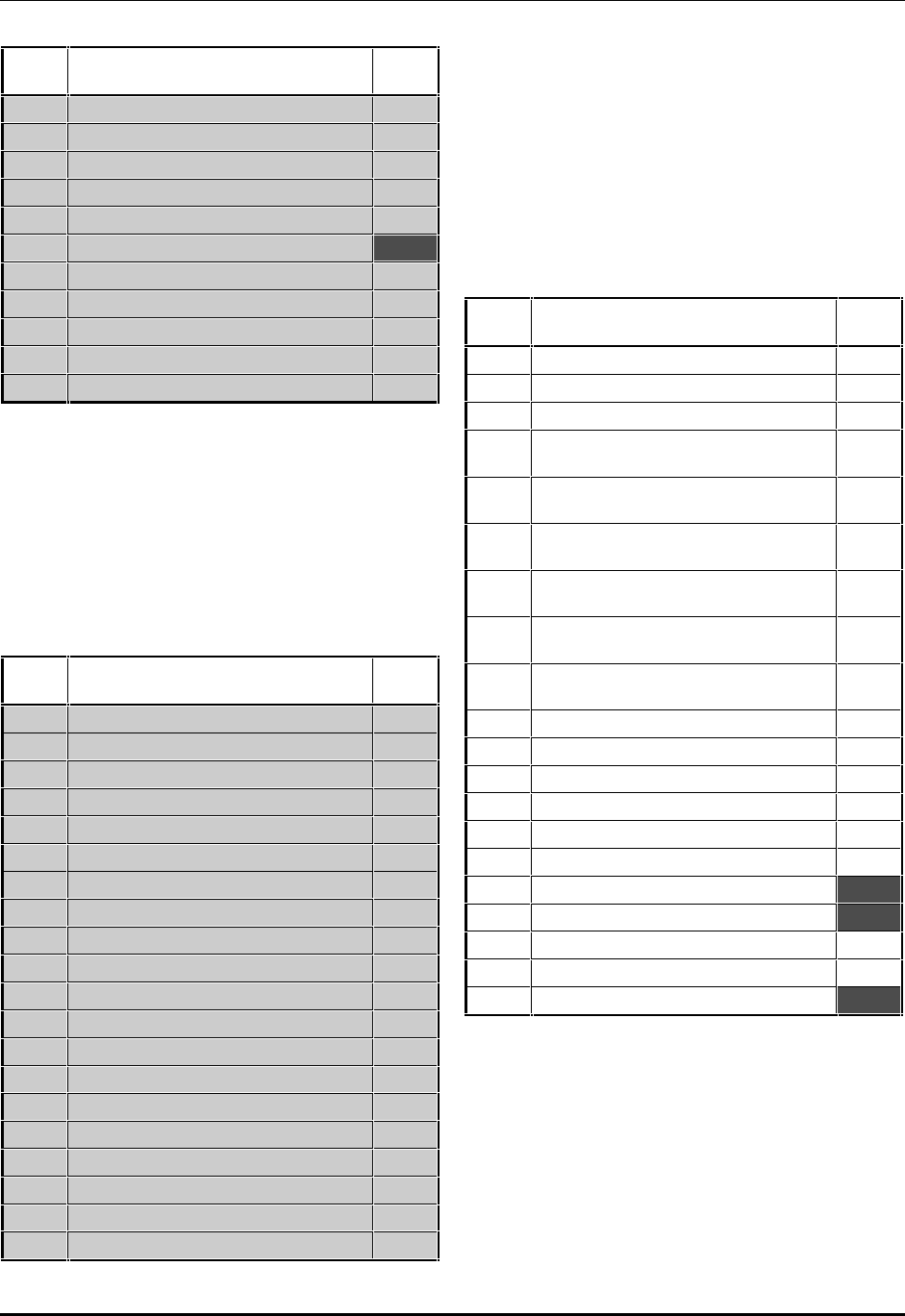
Pr Function User
value
0.00 Configuration and saving
0.01 Minimum frequency
0.02 Maximum frequency
0.03 Acceleration rate
0.04 Deceleration rate
0.05 Reference selector (do not adjust)
0.06 Current limit
0.07 Voltage mode selector
0.08 Boost voltage
0.09 Dynamic V/f select
0.10 Estimated motor speed [M]
[M] indicates the parameter is for monitoring only
For descriptions of these parameters, see
Appendix D Menu 0 Parameters.
List of parameters specific to Macro 5
Pr Function User
value
0.31 Macro number [M]
0.32 Serial comms. mode
0.33 Drive rated current (FLC) [M]
0.34 User security code [M]
0.35 Keypad reference [M]
0.36 Serial comms. baud rate
0.37 Serial comms. address
0.38 Initial parameter displayed
0.39 Synchronize to a spinning motor
0.40 Autotune
0.41 PWM switching frequency selector
0.42 Motor – number of poles
0.43 Motor – power factor
0.44 Motor – rated voltage
0.45 Motor – rated speed
0.46 Motor – rated current
0.47 Motor – rated frequency
0.48 Drive software build number [M]
0.49 Security status [M]
0.50 Drive software version [M]
Pr Function User
value
0.11 Pre-ramp reference [M]
0.12 Post-ramp reference [M]
0.13 Motor active-current [M]
0.14 Analog input 1 (frequency reference)
mode selector
0.15 Analog input 2 (PID reference) mode
selector
0.16 Analog input 3 (PID feedback) mode
selector
0.17 Analog input 1
(frequency reference)
0.18 Analog input 2
(PID reference)
0.19 Analog input 3
(PID feedback)
0.20 PID proportional gain
0.21 PID integral gain
0.22 PID derivative gain
0.23 PID output high limit
0.24 PID output low limit
0.25 PID output scale factor
0.26 Post-scaling PID reference
0.27 Post-scaling PID feedback
0.28 Analog input 2 scaling
0.29 Analog input 3 scaling
0.30 (Not used)























































































































