



















Agilent E1538A Enhanced Frequency/Totalize/PWM SCP 37
Stepper Motor Control Use the command
SOURce:FUNCtion:STEPper <preset_pos>,<mode>,<max_vel>,<min_vel
>,(@<ch_list>)
to control stepper motors. The E1538 can operate 2 or 4 phase motors in full,
and half step mode. Position values are sent from the algorithm to the first
channel of a 2 or 4 channel "motor group". The algorithm reads the current
position from the second channel of the group.
Four-phase stepper motors that require less than 100mA phase current can
be directly driven by the SCP. See Figure 29 for a connection diagram that
also shows the required user-supplied output protection components.
• <preset_pos> defines the position count at algorithm start-up.
• <mode> is used to select the stepping mode. the allowable values are:
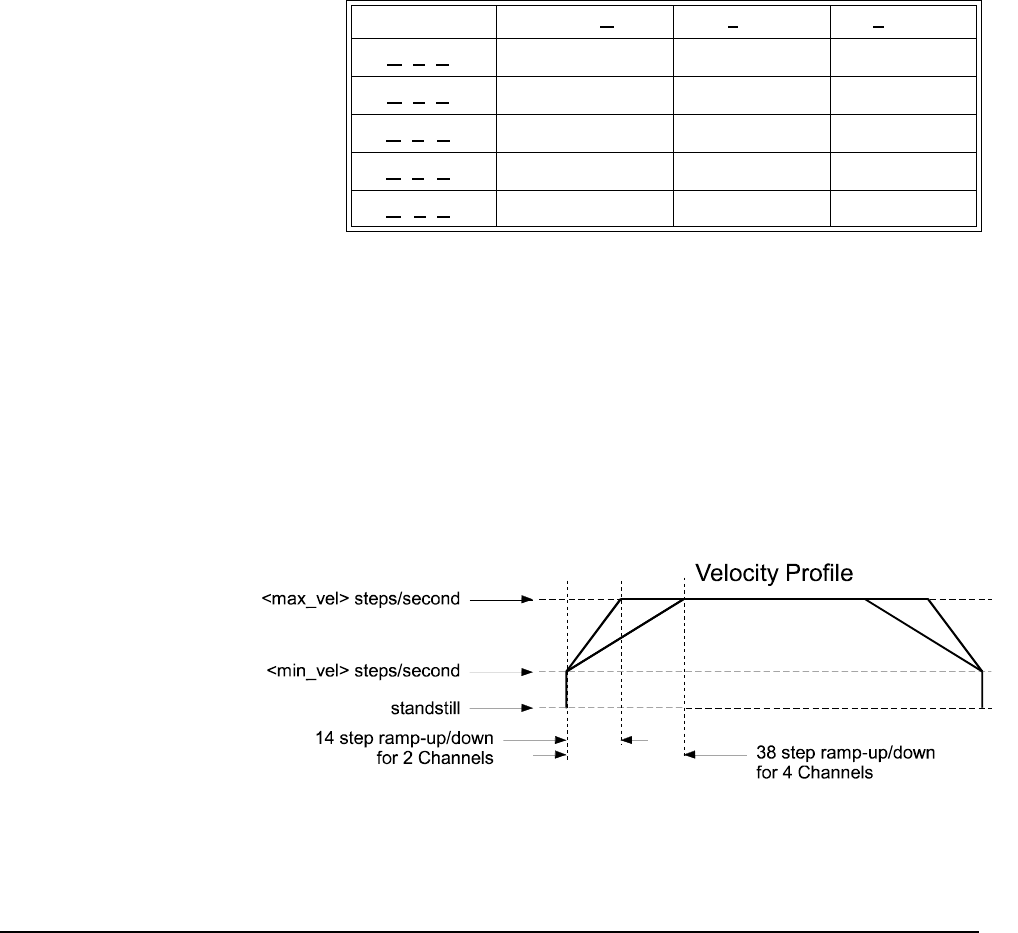
• <min_vel> is specified in steps per second and is the beginning step rate
at the start of the 14 or 38 step ramp-up to <max_vel>.
<max_vel> is specified in steps per second and is the maximum step
rate that will be sent to the motor after ramp-up is complete.
Figure 25 shows the relationship between these parameters. A related
error message: 3120, "Minimum velocity parameter must not exceed
maximum velocity parameter."
• <ch_list> specifies the channels that will control stepper motors. A
Table 1. Stepping <mode> values
<mode> string Stepping Mode Speed Channel
MFSFC2 Full Full 2
M
FSFC4 Full Full 4
M
FSHC2 Full Half 2
MFSHC4 Full Half 4
M
HSFC2 Half Full 4
Figure 25. Relationship of
min_vel
, and
max_vel