

















5 - 10
MELSEC-Q
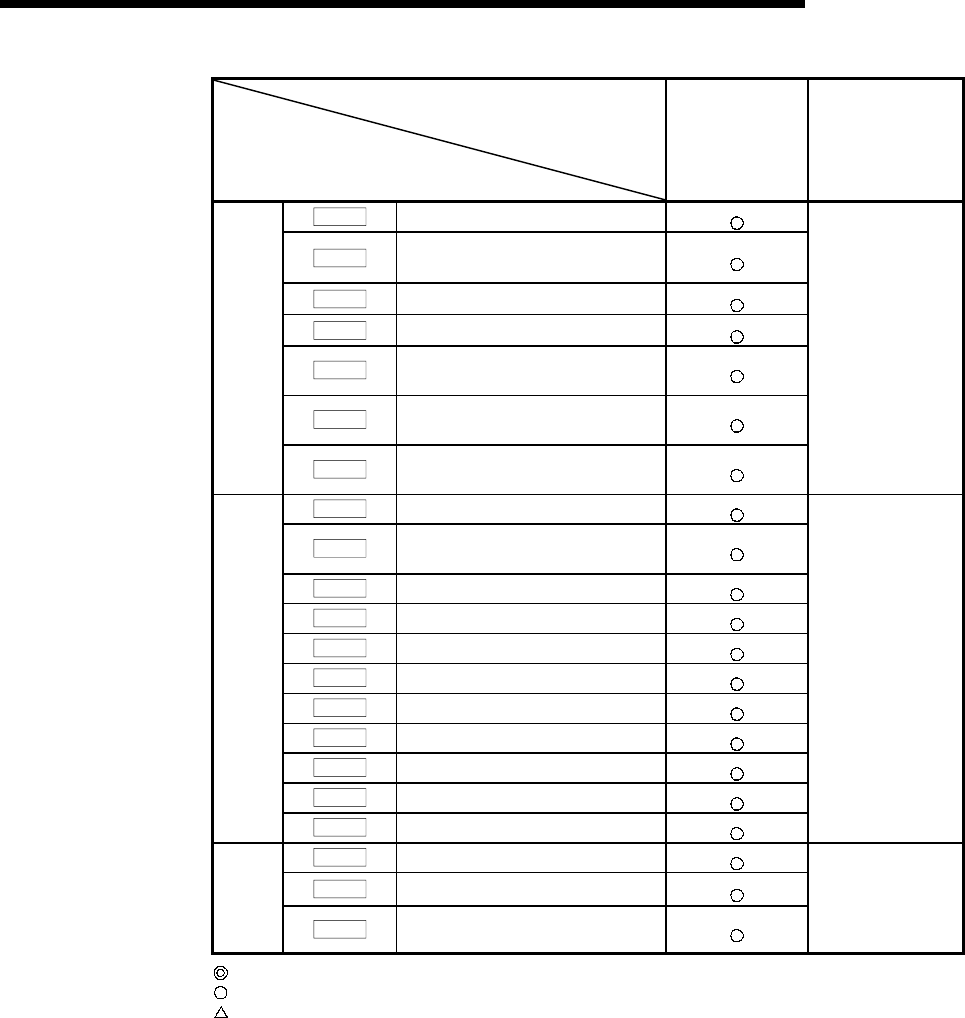
5 DATA USED FOR POSITIONING CONTROL
Servo amplifier
Servo parameters
MR-J3-B Remark
Pr.146
Gain changing time constant
Pr.147
Gain changing ratio of load inertia
moment to servomotor inertia moment
Pr.148
Gain changing position loop gain
Pr.149
Gain changing speed loop gain
Pr.150
Gain changing speed integral
compensation
Pr.151
Gain changing vibration suppression
control vibration frequency setting
Gain • filter parameters
Pr.152
Gain changing vibration suppression
control resonance frequency setting
Refer to the section
5.2.8
Pr.164
Error excessive alarm level
Pr.165
Electromagnetic brake sequence
output
Pr.166
Encoder output pulses selection
Pr.167
Function selection C-1
Pr.168
Function selection C-2
Pr.170
Zero speed
Pr.172
Analog monitor output 1
Pr.173
Analog monitor output 2
Pr.174
Analog monitor 1 offset
Pr.175
Analog monitor 2 offset
Expansion setting parameters
Pr.180
Function selection C-4
Refer to the section
5.2.9
Pr.202
Output signal device selection 1
Pr.203
Output signal device selection 2
I/O setting
parameters
Pr.204
Output signal device selection 3
Refer to the section
5.2.10
: Always set
: Set as required
: Setting restricted