



















8 - 12
MELSEC-Q
8 OPR CONTROL
Restrictions
When this method is used, a deviation will occur in the stop position (OP)
compared to other OPR methods because an error of about 1 ms occurs in taking
in the near-point dog ON.
Precautions during operation
(1) An error "Count method movement amount fault (error code: 206)" will occur
and the operation will not start if the "
Pr.50
Setting for the movement
amount after near-point dog ON" is smaller than the deceleration distance
from the "
Pr.46
OPR speed" to "
Pr.47
Creep speed".
A deceleration stop will be carried out if the speed is changed during the
operation and an error occurs.
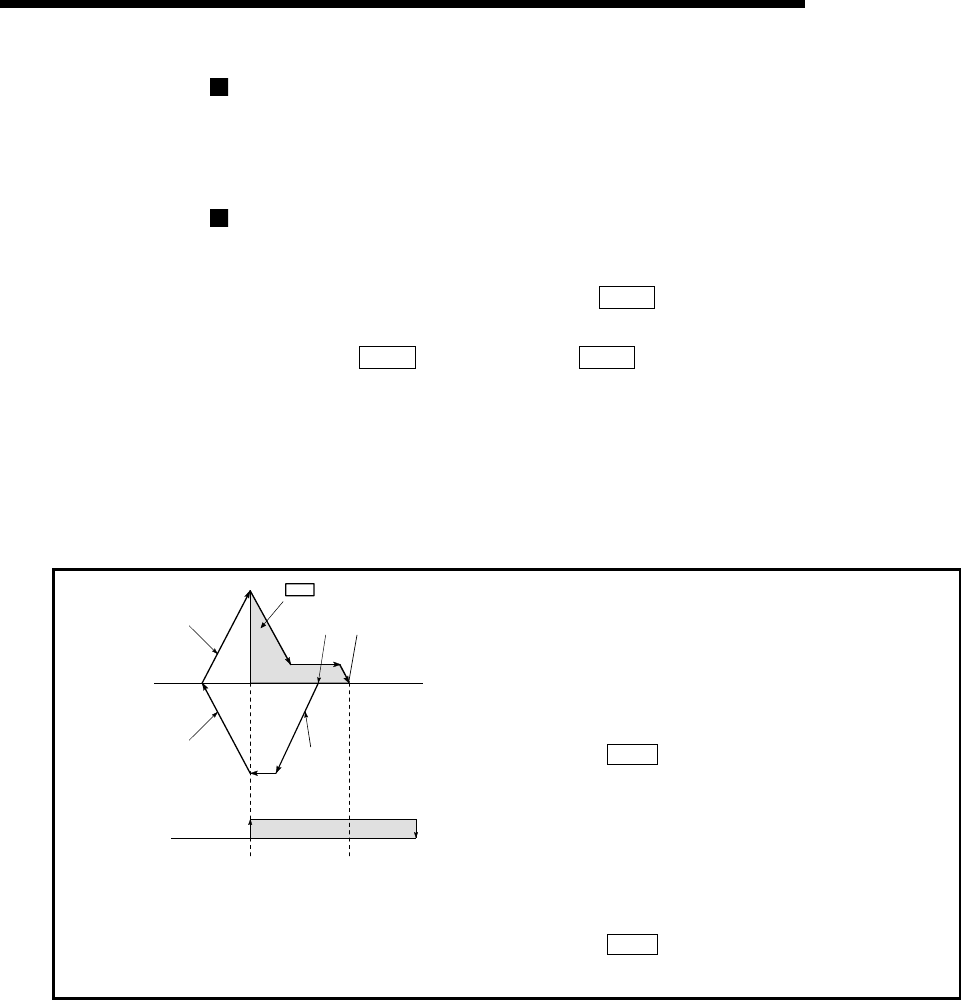
(2) The following shows the operation when a machine OPR is started while the
near-point dog is ON.
(3) When the stop signal stops the machine OPR, carry out the machine OPR
again. When restart command is turned ON after the stop signal stops the
OPR, the error "OPR restart impossible (error code: 209)" will occur.
Pr.50 Setting for the movement amount after
near-point dog ON
ON
1)
5)
4)
3)
2)
Near-point dog OFF
[Operation when an OPR is started at the
near-point dog ON position]
1) A
machine
OPR is started.
2) The machine moves at the OPR speed in the
opposite direction of an OPR.
3) Deceleration processing is carried out by
"
Pr.39
Stop group 3 sudden stop
selection" when the near-point dog OFF is
detected.
4) After the machine stops, a machine
OPR is
carried out in the OPR direction.
5) The machine
OPR is completed after
moving the movement amount set in the
"
Pr.50
Setting for the movement amount
after near-point dog ON".
Fig. 8.8 Count method 2) machine OPR on the near-point dog ON position