

















5 - 31
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
(
Pr.11
Backlash compensation amount) (
Pr.2
No. of pulses per rotation)
0
≤
(
Pr.3
Movement amount per pulse)
( = A)
≤
65535 (PLS) ….(1)
An error (error code: 920) occurs when "
Pr.2
No. of pulses per rotation",
"
Pr.3
Movement amount per pulse" and "
Pr.11
Backlash compensation
amount" setting range is 0 to 65535. (the calculation result of the following (1) )
A servo alarm (error code: 2032, 2035 etc.) may be made to occur by kinds of
servo amplifier (servomotor), load inertia and the amount of command of a
cycle time (QD75MH) is set so that the calculation result of the following (1)
may satisfy "
Pr.2
No. of pulses per rotation", "
Pr.3
Movement amount per
pulse" and "
Pr.11
Backlash compensation amount" setting range is 65536
and lower 0.
(Maximum motor speed (r/min) ) 1.2 (Encoder resolution (PLS/r) ) 1.7 (ms)
A
≤
60(s)
1000 (ms)
(PLS) ....(2)
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with PLC program
(unit)
0 : mm
0 to 6553.5 (
µ
m)
0 to 65535 (
×
10
-1
µ
m)
1 : inch 0 to 0.65535 (inch)
0 to 65535 (
×
10
-5
inch)
2 : degree 0 to 0.65535 (degree)
0 to 65535 (
×
10
-5
degree)
3 : PLS 0 to 65535 (PLS) 0 to 65535 (PLS)
1 to 32767 : Set as a decimal
32768 to 65535 : Convert into hexadecimal and set
[Table 2]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with PLC program
(unit)
0 : mm
-214748364.8 to 214748364.7 (
µ
m)
-2147483648 to 2147483647 (
×
10
-1
µ
m)
1 : inch -21474.83648 to 21474.83647(inch)
-2147483648 to 2147483647 (
×
10
-
5
inch)
2 : degree 0 to 359.99999 (degree) 0 to 35999999 (
×
10
-5
degree
)
3 : PLS -2147483648 to 2147483647(PLS) -2147483648 to 2147483647 (PLS)
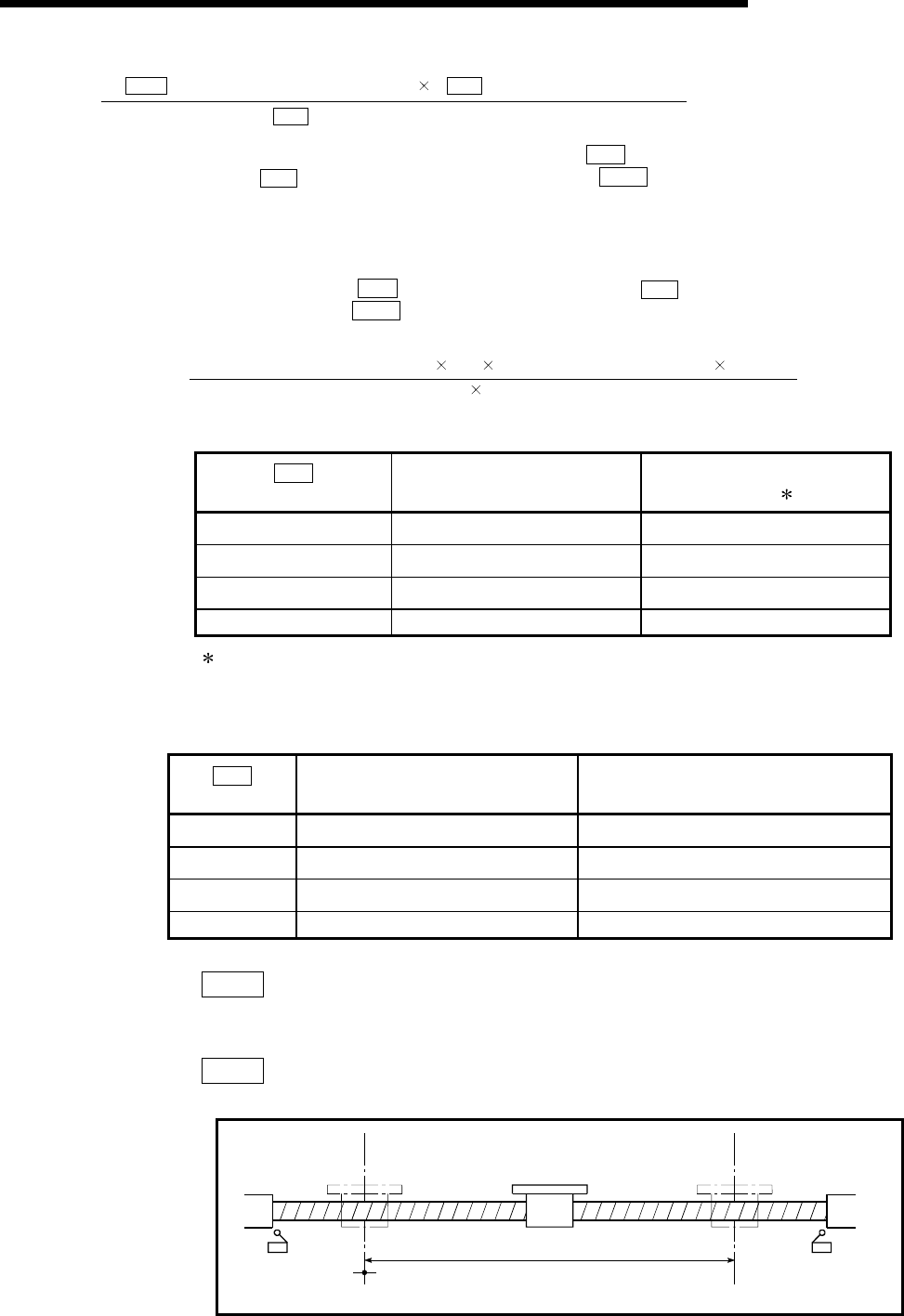
Pr.12
Software stroke limit upper limit value
Set the upper limit for the machine's movement range during positioning control.
Pr.13
Software stroke limit lower limit value
Set the lower limit for the machine's movement range during positioning control.
Software stroke
limit lower limit
Software stroke
limit upper limit
OP
(Machine movement range)
Emergency stop
limit switch
Emergency stop
limit switch