

















6 - 11
MELSEC-Q
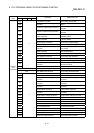
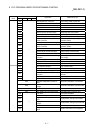
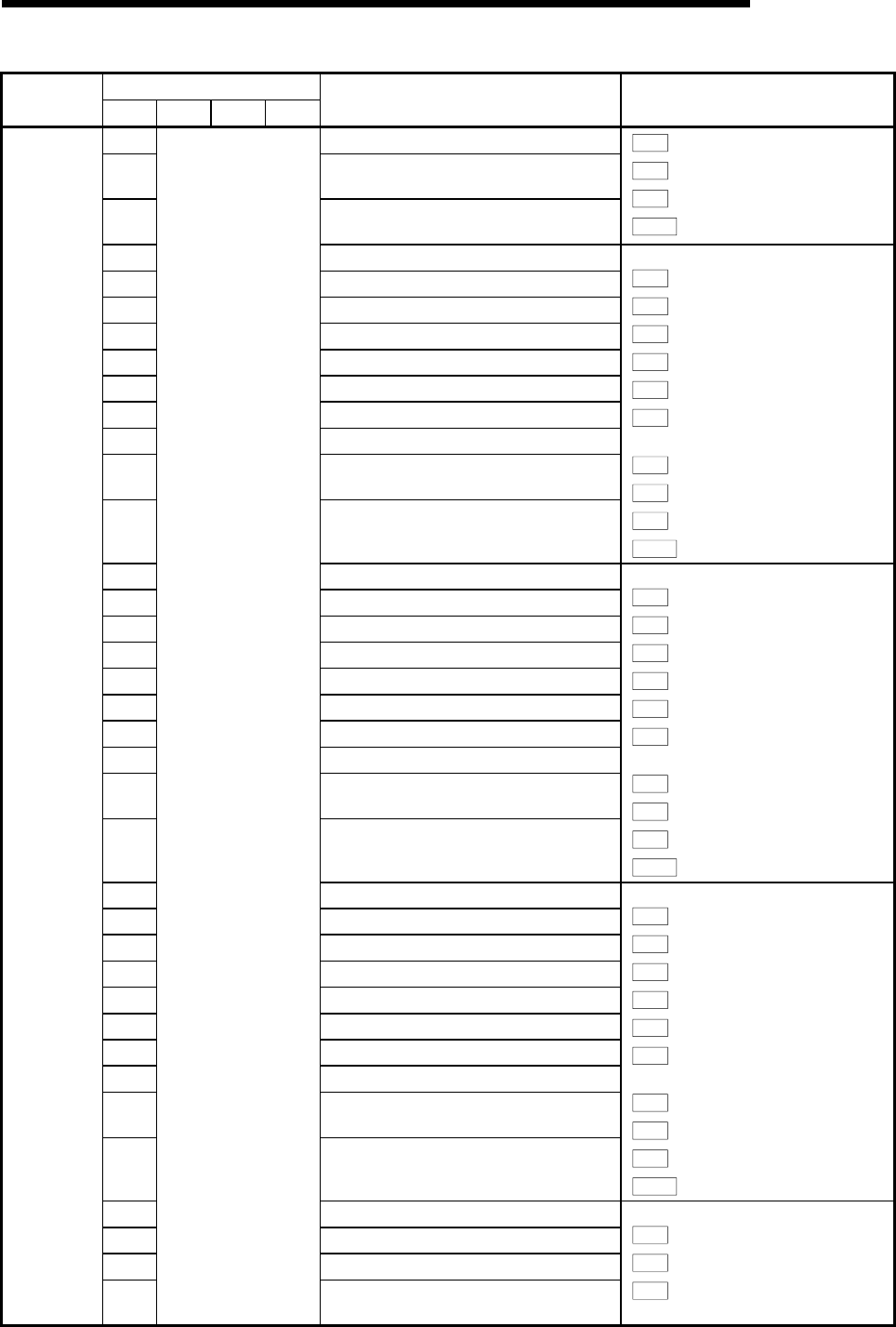
6 PLC PROGRAM USED FOR POSITIONING CONTROL
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details of storage
D107 Positioning address (high-order 16 bits)
D108
Circular interpolation address
(low-order 16 bits)
D109
Circular interpolation address
(high-order 16 bits)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D110 Positioning identifier
D111 M code
D112 Dwell time
D113 Unused
D114 Command speed (low-order 16 bits)
D115 Command speed (high-order 16 bits)
D116 Positioning address (low-order 16 bits)
D117 Positioning address (high-order 16 bits)
D118
Circular interpolation address
(low-order 16 bits)
D119
Circular interpolation address
(high-order 16 bits)
Data No.2
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D120 Positioning identifier
D121 M code
D122 Dwell time
D123 Unused
D124 Command speed (low-order 16 bits)
D125 Command speed (high-order 16 bits)
D126 Positioning address (low-order 16 bits)
D127 Positioning address (high-order 16 bits)
D128
Circular interpolation address
(low-order 16 bits)
D129
Circular interpolation address
(high-order 16 bits)
Data No.3
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D130 Positioning identifier
D131 M code
D132 Dwell time
D133 Unused
D134 Command speed (low-order 16 bits)
D135 Command speed (high-order 16 bits)
D136 Positioning address (low-order 16 bits)
D137 Positioning address (high-order 16 bits)
D138
Circular interpolation address
(low-order 16 bits)
D139
Circular interpolation address
(high-order 16 bits)
Data No.4
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D140 Positioning identifier
D141 M code
D142 Dwell time
Data register
D143
—
Unused
Data No.5
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)