


















8 - 2
MELSEC-Q
8 OPR CONTROL
8.1 Outline of OPR control
8.1.1 Two types of OPR control
In "OPR control" a position is established as the starting point (or "OP") when carrying out
positioning control, and positioning is carried out toward that starting point.
It is used to return a machine system at any position other than the OP to the OP when the
QD75MH issues a "OPR request"
with the power turned ON or others, or after a positioning
stop.
In the QD75MH, the two types of controls shown below are defined as "OPR control",
following the flow of the OPR work.
These two types of OPR control can be executed by setting the "OPR parameters" ,setting
"Positioning start No. 9001" and "positioning start No. 9002" prepared beforehand in the
QD75MH to "
Cd.3
Positioning start No.", and turning ON the positioning start signal.
The PSTRT
start numbers of the dedicated instruction can also be set to 9001 or 9002 to
execute the OPR control. (For details, refer to Chapter 14 "Dedicated instructions".)
(1) Establish a positioning control OP
– "Machine OPR" (positioning start No. 9001)
(2) Carry out positioning toward the OP
– "Fast OPR" (positioning start No. 9002).
The "machine OPR" in (1) above must always be carried out before executing the "fast
OPR" in (2).
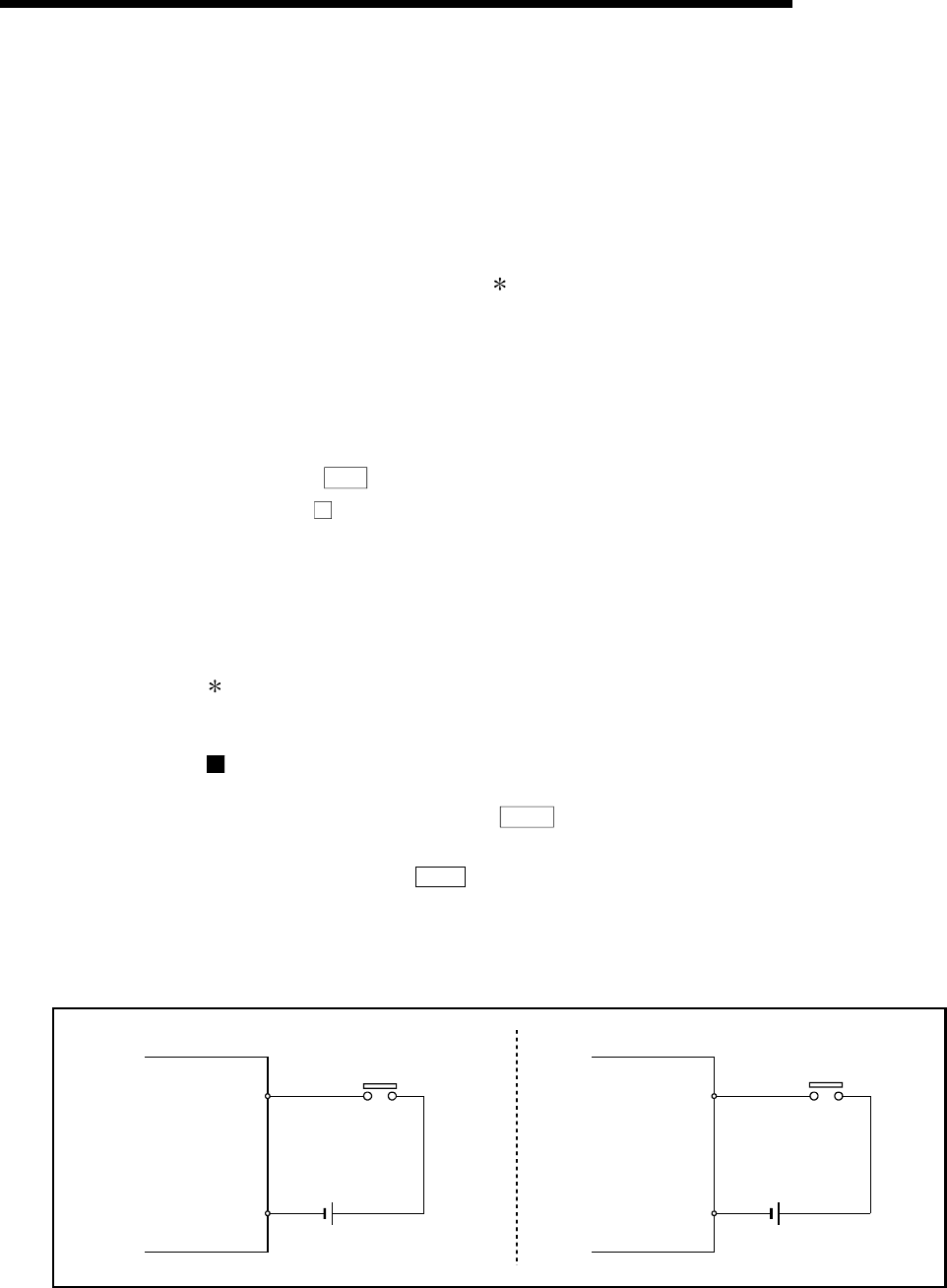
Wiring the near-point dog
When the near point dog is connected, either the external input signal of QD75MH or
servo amplifier is selected by "
Pr.80
External input signal selection" whether use it.
If the external input signal of the servo amplifier is used, it is only used to the near-
point dog method of "
Pr.43
OPR method".
An error "Illegal near-point dog signal" (error code: 220) will occur if the external
input signal of the servo amplifier is used to the count method 1) or 2) of OPR
method.
QD75MH
DOG
COM
24VDC
MR-J3-B
DI3
(DOG)
DICOM
24VDC
Fig. 8.1 Wiring when using the near-point dog