

















6 - 12
MELSEC-Q
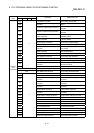
6 PLC PROGRAM USED FOR POSITIONING CONTROL
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details of storage
D144 Command speed (low-order 16 bits)
D145 Command speed (low-order 16 bits)
D146 Positioning address (low-order 16 bits)
D147 Positioning address (high-order 16 bits)
D148
Circular interpolation address
(low-order 16 bits)
D149
Circular interpolation address
(high-order 16 bits)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D150 Positioning identifier
D151 M code
D152 Dwell time
D153 Unused
D154 Command speed (low-order 16 bits)
D155 Command speed (high-order 16 bits)
D156 Positioning address (low-order 16 bits)
D157 Positioning address (high-order 16 bits)
D158
Circular interpolation address
(low-order 16 bits)
D159
Circular interpolation address
(high-order 16 bits)
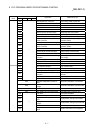
Data No.6
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D190 Positioning identifier
D191 M code
D192 Dwell time
D193 Unused
D194 Command speed (low-order 16 bits)
D195 Command speed (high-order 16 bits)
D196 Positioning address (low-order 16 bits)
D197 Positioning address (high-order 16 bits)
D198
Circular interpolation address
(low-order 16 bits)
D199
Circular interpolation address
(high-order 16 bits)
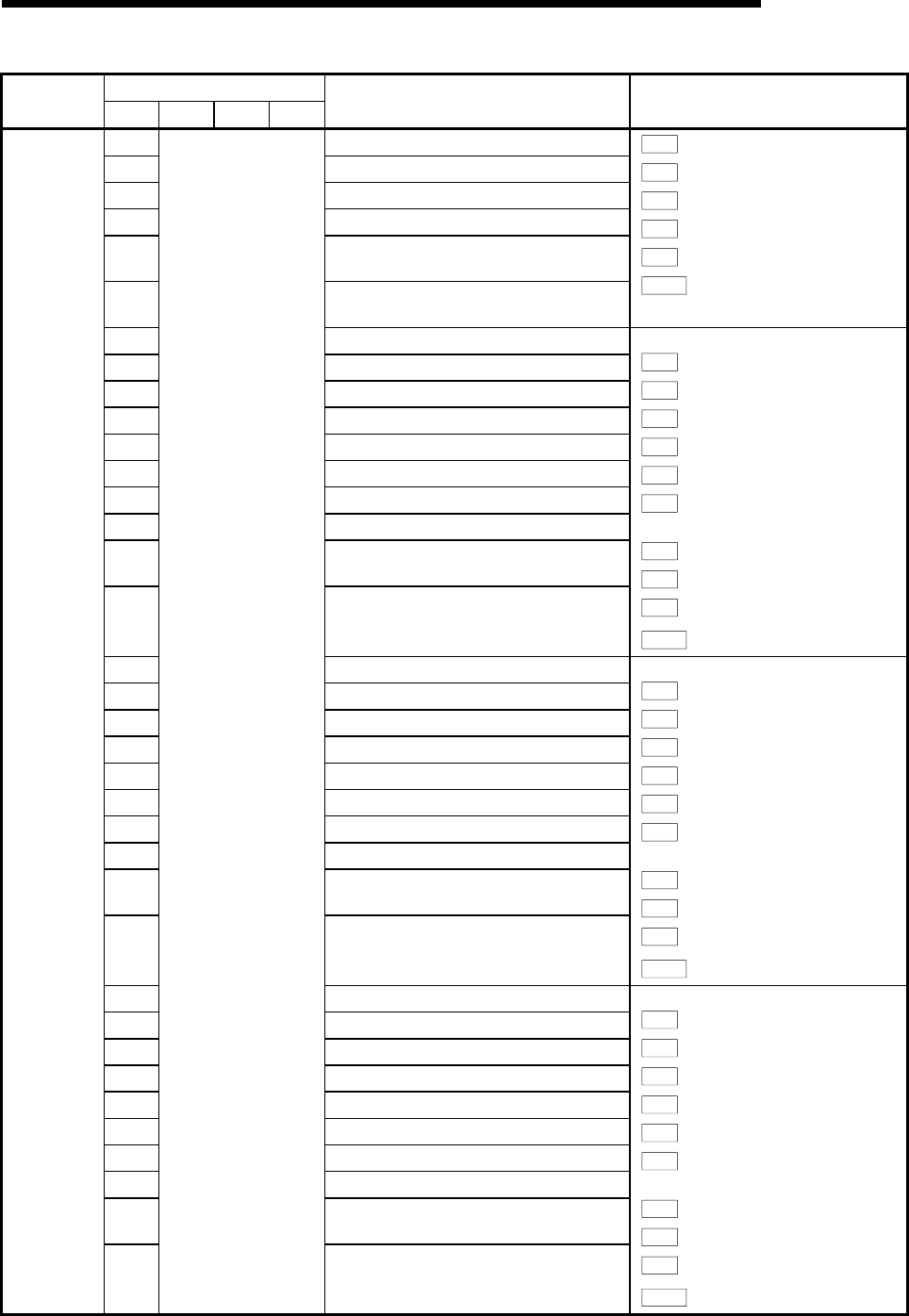
Data No.10
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)
D200 Positioning identifier
D201 M code
D202 Dwell time
D203 Unused
D204 Command speed (low-order 16 bits)
D205 Command speed (high-order 16 bits)
D206 Positioning address (low-order 16 bits)
D207 Positioning address (high-order 16 bits)
D208
Circular interpolation address
(low-order 16 bits)
Data register
D209
—
Circular interpolation address
(high-order 16 bits)
Data No.11
(
Da.1
Operation pattern)
(
Da.2
Control system)
(
Da.3
Acceleration time No.)
(
Da.4
Deceleration time No.)
(
Da.5
Axis to be interpolated)
(
Da.6
Positioning address/
movement amount)
(
Da.7
Circular interpolation address)
(
Da.8
Command speed)
(
Da.9
Dwell time)
(
Da.10
M code)