



















12 - 51
MELSEC-Q
12 CONTROL SUB FUNCTIONS
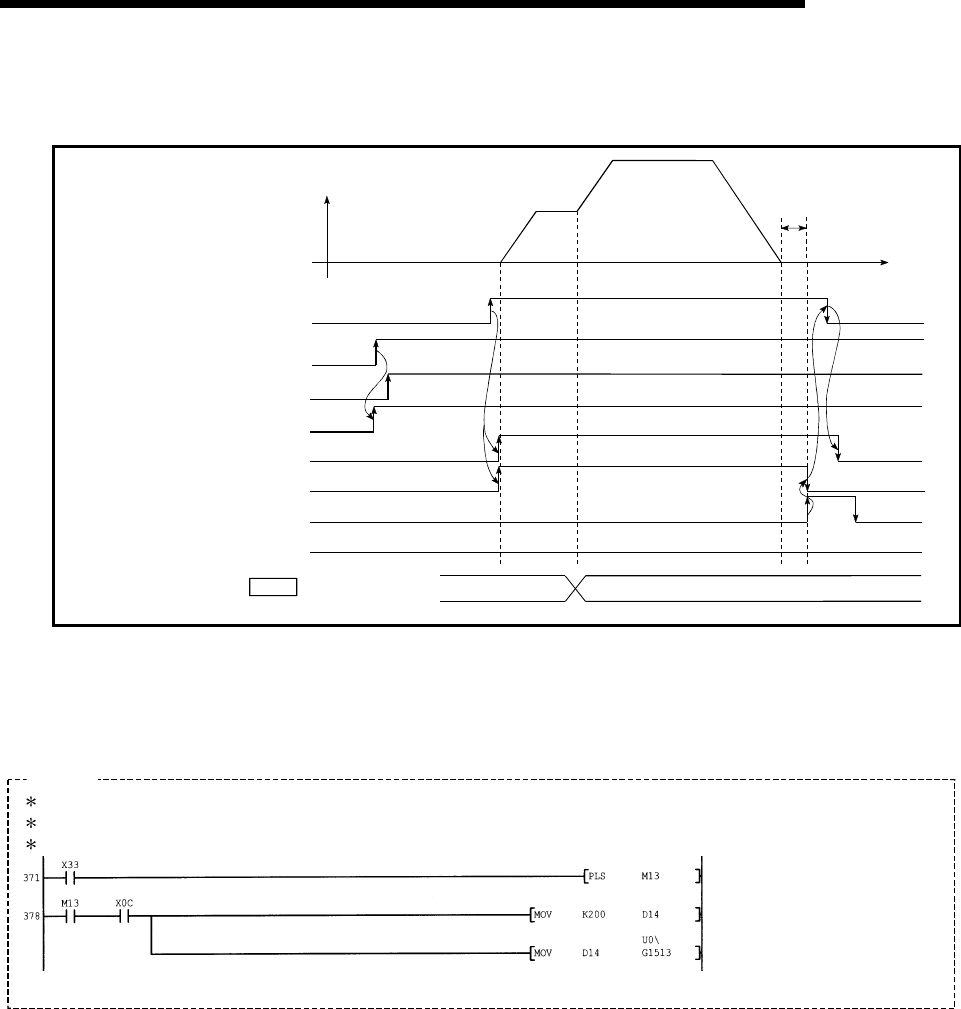
(2) The following shows a time chart for changing the speed using the override
function.
Cd. 13 Positioning operation
speed override
V
t
Dwell time
200
BUSY signal
Error detection signal
A
ll axis servo ON
Positioning start signal
Positioning complete signal
QD75 READY signal
Start complete signal
[Y10]
[Y1]
[X0]
[X10]
[XC]
[X14]
[X8]
PLC READY signal
[Y0]
Fig. 12.30 Time chart for changing the speed using the override function
(3) Add the following PLC program to the control program, and write it to the
PLC CPU.
—á
Example
No.15 Override program
<Pulsate override command>
<Set override value (200%)>
<Write override value>