

















6 - 9
MELSEC-Q
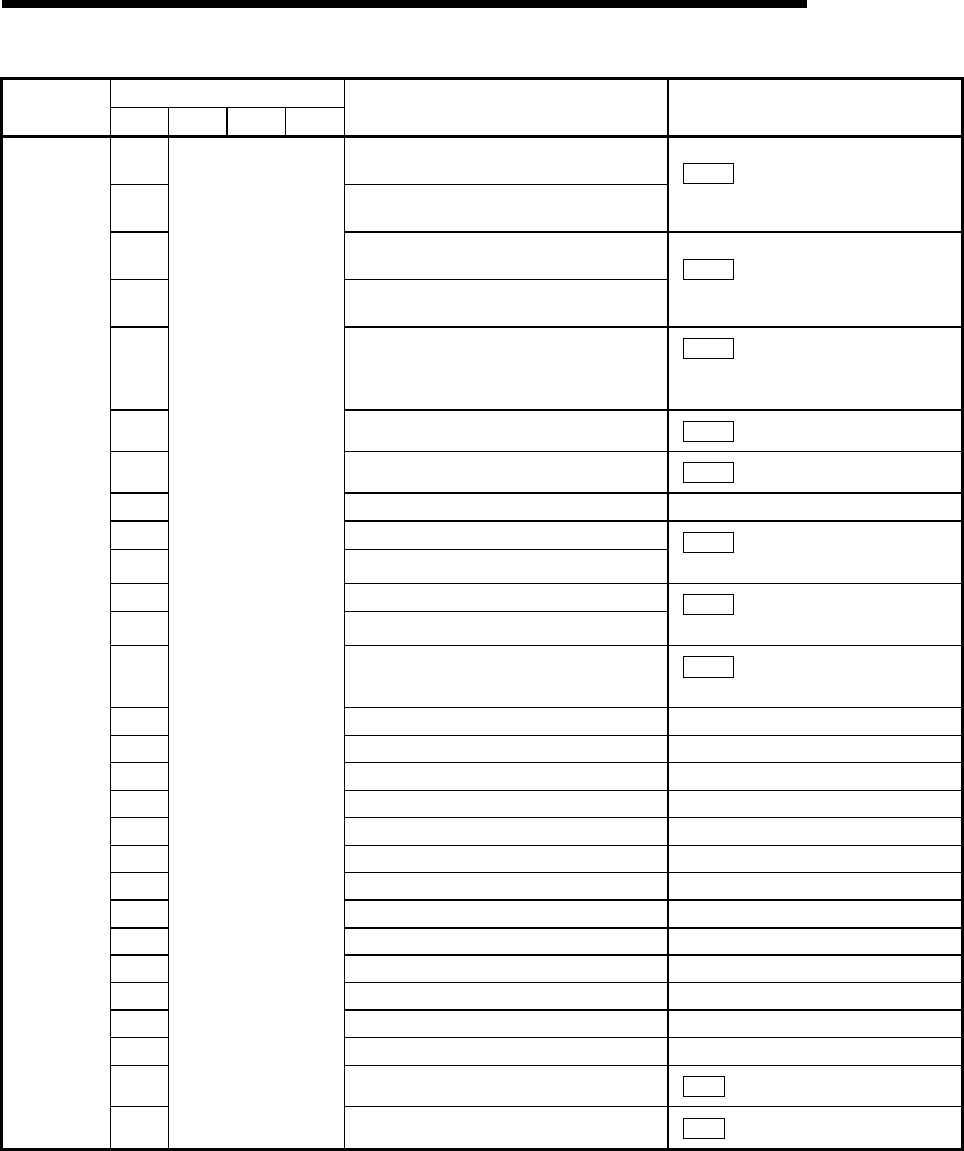
6 PLC PROGRAM USED FOR POSITIONING CONTROL
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details of storage
D15
Acceleration time setting
(low-order 16 bits)
D16
Acceleration time setting
(high-order 16 bits)
(
Cd.10
New acceleration time
value)
D17
Deceleration time setting
(low-order 16 bits)
D18
Deceleration time setting
(high-order 16 bits)
(
Cd.11
New deceleration time
value)
D19
Acceleration/deceleration time change
enable
(
Cd.12
Acceleration/deceleration
time change enable/disable selection
in speed change)
D20 Step valid flag
(
Cd.35
Step valid flag)
D21 Step mode
(
Cd.34
Step mode)
D22 Step start information —
D23 Target position (low-order 16 bits)
D24 Target position (high-order 16 bits)
(
Cd.27
New target position value
(address))
D25 Target speed (low-order 16 bits)
D26 Target speed (high-order 16 bits)
(
Cd.28
New target position value
(speed))
D27 Target position change request
(
Cd.29
New target position change
value flag)
D28 Unused —
D29 Unused —
D30 PSTRT1 instruction control data —
D31 Completion status —
D32 Start number —
D33 TEACH1 instruction control data —
D34 Completion status —
D35 Teaching data —
D36 Positioning data No. —
D37 PINIT instruction control data —
D38 Completion status —
D39 PFWRT instruction control data —
D40 Completion status —
D50 Unit setting
(
Pr.1
Unit setting)
Data register
D51
—
Unit magnification
(
Pr.4
Unit magnification)