



















1 - 17
MELSEC-Q
1 PRODUCT OUTLINE
Overview of acceleration/deceleration processing control
Acceleration/deceleration processing for the positioning processing, manual pulse-
generator processing, OPR processing and JOG processing is performed using the
user-specified method, acceleration time and deceleration time.
(1) Acceleration/deceleration method
There are two types of acceleration and deceleration processing: the automatic
trapezoidal acceleration/deceleration processing method and S-pattern
acceleration/deceleration processing method. A detailed parameter is used to set
which method is used. The specified acceleration/deceleration method is applied
to all accelerations and decelerations when starting and completing positioning
processing, OPR processing and JOG processing, as well as when changing the
speed.
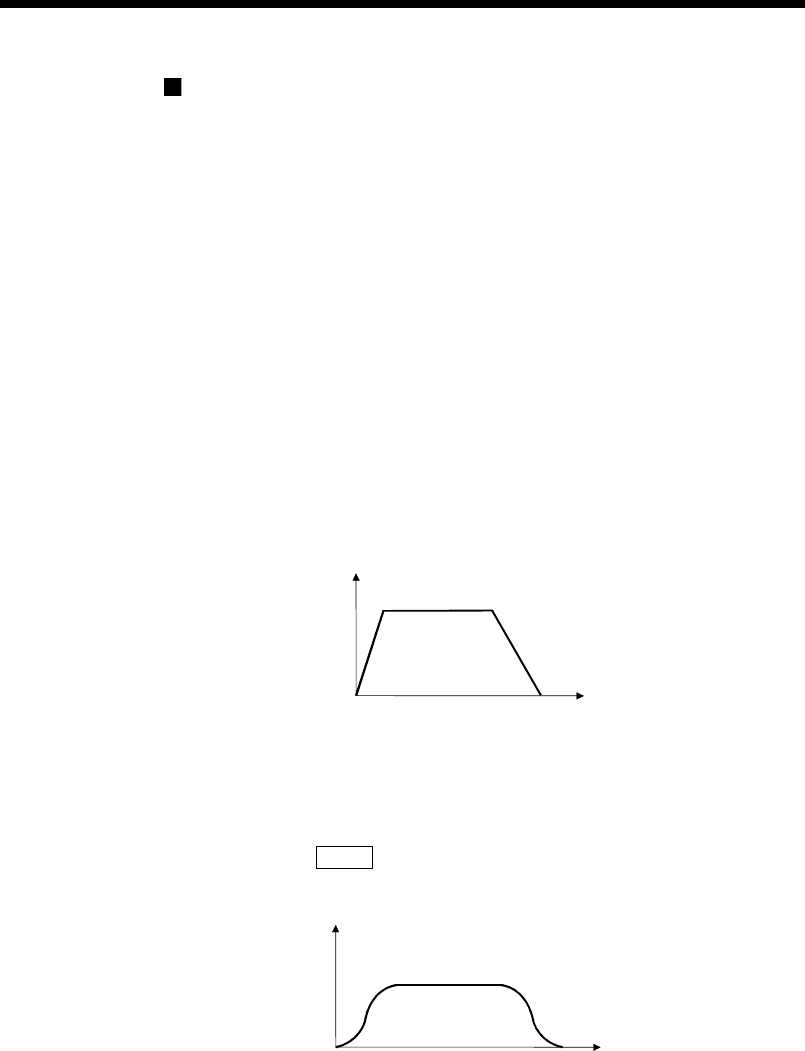
(a) Automatic trapezoidal acceleration/deceleration processing method
This is a method in which linear acceleration/deceleration is carried out
based on the acceleration time, deceleration time, and speed limit value set
by the user.
Velocity
Tim
e
(b) S-pattern acceleration/deceleration processing method
This method reduces the load on the motor when starting and stopping.
This is a method in which acceleration/deceleration is carried out gradually,
based on the acceleration time, deceleration time, speed limit value, and
"
Pr.35
S-pattern proportion" (1 to 100%) set by the user.
V
elocity
Time
(2) Acceleration time, deceleration time, sudden-stop deceleration time
(a) For types each of the acceleration time and deceleration time for positioning
control can be set using basic parameters 2 and detailed parameters 2.
• Acceleration time…….The time elapses before the speed of 0 reaches
the limit value.
• Deceleration time…….The time elapses before the speed at the limit
value reaches 0.
(b) The sudden-stop deceleration time (1 to 8388608 ms) is set using the
acceleration time/deceleration time setting size selection of detailed
parameters 2.