



















15 - 10
MELSEC-Q
15 TROUBLESHOOTING
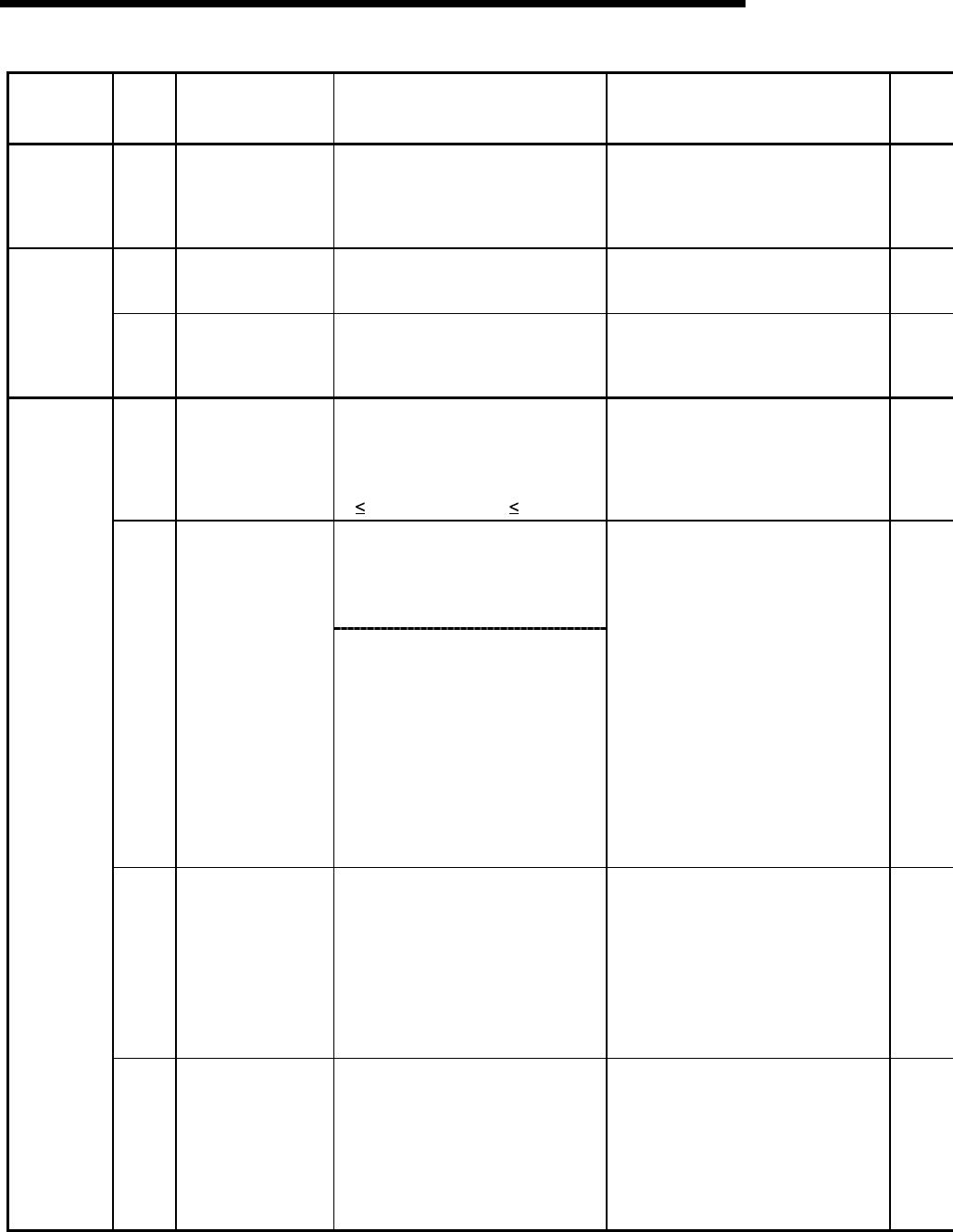
Classification
of errors
Error
code
Error name Error Operation status at error occurrence
Home
position
return (OPR)
220
Illegal near-point dog
signal
When the count method 1) or 2) –
machine home position return (OPR)
is started, the near-point dog is set to
"1: External input signal of servo
amplifier".
Home position return (OPR) is not
started.
300
Outside JOG speed
range
At the time of JOG starting, the JOG
speed comes out of a specified
range.
The JOG operation is not carried out
when the JOG speed is outside the
setting range at the time of JOG start.
JOG
operation or
inching
operation
errors
301
Inching movement
amount error
The inching movement amount
exceeds the JOG speed limit.
The inching operation is not carried
out when the inching movement
amount exceeds a JOG speed limit at
the time of inching start.
500
Illegal condition data
No.
The condition data No. is outside the
setting range when a block using the
condition data is started by a special
starting (conditional start, wait start,
simultaneous start, FOR (condition)).
(1
Condition data No. 10)
The operation is terminated.
<When blocks are started
simultaneously>
• The partner axis for simultaneous
start is BUSY.
501
Error before
simultaneous start
<When multiple axes are started and
controlled simultaneously>
• The partner axis for simultaneous
start is BUSY.
• The "Simultaneous start axis start
data No." of the start axis is 0 or is
outside the setting range.
• The "Simultaneous start axis start
data No." of those axes other than
the start axis is outside the setting
range.
At start: The system will not operate.
During operation:
The system stops
immediately.
502 Illegal data No.
• The positioning data No. tried to be
executed is outside the ranges of 1
to 600, 7000 to 7004, and 9001 to
9004.
• The designation of a JUMP
destination is executed currently.
• The designation of a JUMP
destination is outside the ranges of
1 to 600.
The positioning data is not executed.
Positioning
operation
errors
503
Command speed is
not set
• At the start of positioning, a current
speed (–1) is set for the command
speed of the positioning data to be
initially executed.
• The current speed is set by speed
control.
• The current speed is set for speed-
position switching control.
At the start of positioning, operation
does not start.